




















1. Uvod u pogone izmjenične struje (pogoni s promjenjivom frekvencijom) U području moderne industrijske kontrole i......
PROČITAJ VIŠE
Dom / Vijesti / Vijesti iz industrije / Objašnjenje AC servo motora: kako radi, vrste i kako odabrati pravi
Objašnjenje AC servo motora: kako radi, vrste i kako odabrati pravi
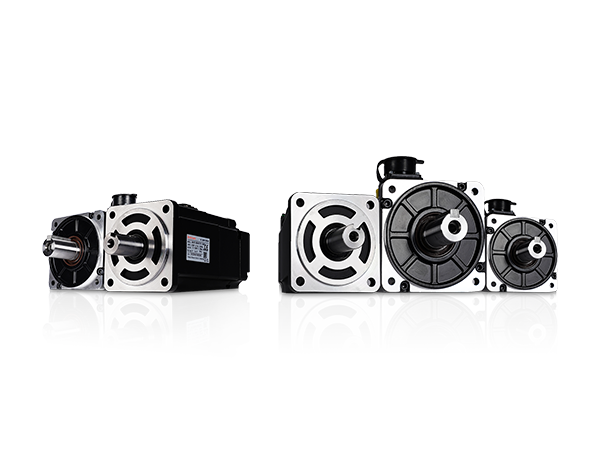
Što je AC servo motor?
AC servo motor je vrsta električnog motora koji radi na izmjeničnu struju i dizajniran je za pružanje precizne kontrole položaja, brzine i momenta. Za razliku od običnog AC motora koji se samo vrti fiksnom brzinom, servo motor stalno prima povratnu informaciju od enkodera pričvršćenog na njegovu osovinu. Ta povratna informacija govori sustavu gdje se točno motor nalazi u bilo kojem trenutku, dopuštajući mu da radi korekcije u stvarnom vremenu i drži ciljnu poziciju s velikom preciznošću.
Riječ "servo" dolazi od latinske riječi za roba - i to je u biti ono što on radi. Vjerno slijedi naredbe iz kontrolera, kontinuirano se prilagođavajući bilo kojem položaju, brzini ili momentu koji se zahtijeva. To AC servo motore čini okosnicom moderne automatizacije, CNC strojeva, robotike i svih aplikacija u kojima je važna preciznost kretanja.
Ono što razlikuje AC servo motor od DC servo motora je izvor napajanja i konstrukcija. AC servo motori općenito su izdržljiviji, zahtijevaju manje održavanja (bez četkica za zamjenu) i prikladniji su za industrijska okruženja velike brzine i velike snage. Gotovo se uvijek koriste zajedno sa servo pogonom (koji se naziva i servo pojačalo) i kontrolerom gibanja kako bi se formirao potpuni servo sustav zatvorene petlje.
Kako radi AC servo motor
Temeljni princip koji stoji iza AC servo motora je kontrola zatvorene povratne sprege. Evo jednostavne analize kako sustav funkcionira od početka do kraja:
- Unos naredbe: Kontroler kretanja (PLC, CNC kontroler ili osobno računalo) šalje ciljanu vrijednost — kao što je "okret za 90 stupnjeva" ili "okretanje pri 3000 okretaja u minuti" — servo pogonu.
- Izlaz servo pogona: Servo pogon pretvara naredbu u precizno kontrolirani izmjenični napon i struju, koji se dovodi do motora.
- Motorno kretanje: Rotor motora se pomiče kao odgovor na elektromagnetsko polje koje stvaraju namoti statora.
- Povratne informacije kodera: Rotacijski enkoder postavljen na osovinu motora kontinuirano mjeri stvarni položaj i brzinu, šaljući te podatke natrag u servo pogon.
- Ispravak pogreške: Pogon uspoređuje stvarni položaj sa zadanim položajem i trenutačno prilagođava izlaz kako bi eliminirao sve razlike (koje se nazivaju "greška").
Ova petlja radi stotine ili tisuće puta u sekundi, zbog čega servo sustavi mogu postići tako niske tolerancije. Koder je kritična komponenta — većina modernih AC servo motora koristi kodere visoke razlučivosti sa 17-bitnom ili 23-bitnom rezolucijom, što znači da mogu otkriti milijune različitih pozicija po okretaju.
Vrste AC servo motora
Postoje dvije glavne vrste AC servo motora koji se danas koriste u industriji, svaki s različitim principima rada i idealnim slučajevima uporabe.
Sinkroni AC servo motor (PMSM)
Sinkroni AC servo motor — poznat i kao sinkroni motor s trajnim magnetom (PMSM) — koristi trajne magnete ugrađene u rotor. Rotor se vrti u točnoj sinkronizaciji s rotirajućim magnetskim poljem u statoru. Budući da su magneti uvijek uključeni, ovaj tip motora proizvodi veliki okretni moment čak i pri malim brzinama i ima odličan dinamički odziv.
Sinkroni servo motori su daleko najčešći tip koji se koristi u industrijskoj automatizaciji i CNC aplikacijama. Kompaktni su, učinkoviti i sposobni održavati nazivni zakretni moment u širokom rasponu brzina. Marke kao što su Mitsubishi, Fanuc, Yaskawa i Siemens nude sinkrone servo motore kao svoju primarnu liniju proizvoda.
Indukcijski AC servo motor (asinkroni)
Indukcijski servo motor koristi kavezni rotor gdje se struja inducira rotirajućim magnetskim poljem — nema trajnih magneta. Rotor uvijek malo zaostaje za poljem statora (to se zove "klizanje"), tako se stvara moment. Kada su upareni sa servo pogonom s vektorskom kontrolom, indukcijski motori također mogu postići dobru kontrolu brzine i momenta, iako obično nisu tako precizni ili osjetljivi kao sinkroni tipovi.
Indukcijski servo motori često se biraju za aplikacije vretena velike snage, kao što su vretena CNC glodalica, gdje su vrlo velike brzine i robusnost važniji od ultrapreciznog pozicioniranja. Oni su također jeftiniji pri većoj snazi.
Ključne specifikacije koje trebate razumjeti
Prije odabira ili rada s bilo kojim AC servo motorom, morate razumjeti osnovne specifikacije na podatkovnoj tablici. Evo jednostavnog pregleda najvažnijih parametara:
| Specifikacija | Što to znači | Zašto je važno |
| Nazivni zakretni moment (N·m) | Kontinuirani okretni moment koji motor može proizvesti pri nazivnoj brzini | Mora premašiti moment opterećenja uključujući trenje i inerciju |
| Najveći zakretni moment (N·m) | Maksimalni zakretni moment za kratke udare (obično 2–3× nazivno) | Potreban za faze ubrzanja i usporavanja |
| Nazivna brzina (RPM) | Normalna radna brzina pri nazivnom momentu | Određuje odgovara li motor vašem profilu kretanja |
| Nazivna snaga (W ili kW) | Izlazna mehanička snaga (okretni moment × brzina) | Koristi se za usklađivanje pogona i veličine kabela/prekidača |
| Razlučivost kodera | Broj impulsa ili bitova po okretaju | Veća rezolucija = finija kontrola položaja |
| Inercija rotora (kg·cm²) | Otpornost rotora na promjene brzine vrtnje | Mora se uskladiti s inercijom opterećenja za stabilnu kontrolu |
| IP ocjena | Razina zaštite od prodora prašine i vode | Kritično za teške ili vlažne uvjete |
AC servo motor naspram koračnog motora: Što biste trebali koristiti?
Jedno od najčešćih pitanja u upravljanju kretanjem je hoće li se koristiti AC servo motor ili koračni motor. Oba mogu kontrolirati položaj, ali rade vrlo različito i odgovaraju različitim aplikacijama.
Koračni motor kreće se u fiksnim koracima (koracima) i radi u otvorenoj petlji — što znači da nema povratne informacije kodera u većini osnovnih postavki. Jednostavan je, jeftin i dobro radi za mala opterećenja pri umjerenim brzinama. Međutim, steperi mogu propustiti korake u uvjetima preopterećenja bez ikakve samoispravke, a gube značajan okretni moment pri većim brzinama.
Za razliku od toga, AC servo motor uvijek točno zna gdje se nalazi zahvaljujući enkoderu. Neće izgubiti položaj pod opterećenjem, brže reagira na naredbe i održava puni okretni moment u širokom rasponu brzine. Kompromis je trošak i složenost — servo sustav (podešavanje kabela za pogon motora) košta znatno više od koračne postave ekvivalentne veličine.
Evo jednostavnog pravila: koristite steper za jednostavno pozicioniranje s niskim opterećenjem i malom brzinom gdje je cijena kritična. Upotrijebite AC servo motor kada trebate veliku brzinu, veliki okretni moment, dinamičke promjene opterećenja ili kada se o točnosti položaja ne može raspravljati.

Uobičajene primjene AC servo motora
AC servo motori pojavljuju se u gotovo svakoj industriji gdje je potrebno kontrolirano kretanje. Neke od najčešćih aplikacija uključuju:
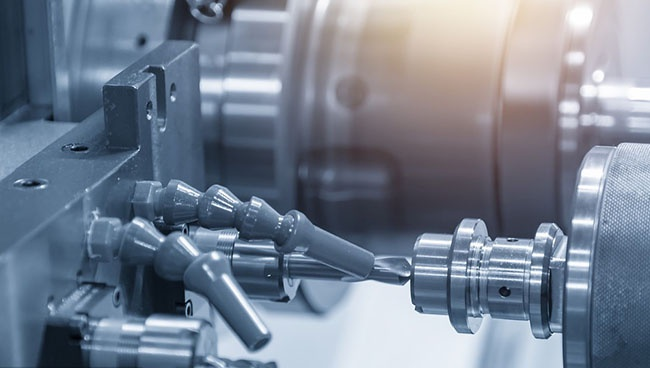
- CNC obradni centri: Servo motori pokreću X, Y i Z osi glodalica i tokarilica, kao i vreteno u nekim konfiguracijama. Omogućuju stroju rezanje složenih oblika s točnošću na razini mikrona.
- Industrijski roboti: Svaki zglob robotske ruke sa 6 osi obično pokreće vlastiti servo motor. Koordinirana kontrola svih zglobova omogućuje tečno, precizno kretanje duž složenih putanja.
- Strojevi za pakiranje: Servo motori kontroliraju operacije indeksiranja, rezanja, pečaćenja i punjenja u brzim linijama za pakiranje, gdje su ponovljivost i brzina bitni.
- Proizvodnja poluvodiča: Rukovanje pločicama, sustavi za odabir i postavljanje i oprema za inspekciju oslanjaju se na servo motore za ponovljivost pozicioniranja na nanometarskoj razini.
- Ispis i pretvaranje: Kontrola registra u tiskarskim prešama i kontrola napetosti u sustavima za rukovanje trakom ovise o servo motorima za održavanje dosljednog dodavanja materijala.
- Medicinska oprema: CT skeneri, kirurški roboti i pumpe za infuziju koriste male, precizne servo motore kako bi osigurali siguran i točan rad.
Kako odabrati pravi AC servo motor
Odabir pravog AC servo motora svodi se na pažljivo usklađivanje mogućnosti motora sa zahtjevima vaše aplikacije. Žurba s ovim korakom dovodi ili do sustava s nedostatkom snage koji zakaže na terenu ili do prevelikog, precijenjenog rješenja. Slijedite ove korake:
Korak 1 — Definirajte svoje zahtjeve za opterećenje
Započnite izračunavanjem momenta opterećenja, koji uključuje silu ili težinu koja se pomiče, trenje i bilo koji mehanički prijenos (mjenjač, remen, kuglični vijak). Također izračunajte inerciju tereta — to vam govori koliko energije motor mora dati da ubrza teret. Opća industrijska smjernica je držati omjer opterećenja i inercije motora ispod 10:1 za dobru stabilnost upravljanja, a idealno 3:1 ili manje za visokodinamičke primjene.
Korak 2 — Definirajte svoj profil kretanja
Skicirajte grafikon brzine u odnosu na vrijeme za svoj ciklus kretanja. Zabilježite potrebnu vršnu brzinu, vremena ubrzanja i usporavanja i radni ciklus (koliko dugo motor radi neprekidno u odnosu na vrijeme mirovanja). Ovo određuje i vršni potrebni zakretni moment (tijekom ubrzanja) i RMS (srednji kvadratni korijen) zakretni moment, koji mora ostati ispod nominalnog trajnog zakretnog momenta motora kako bi se izbjeglo pregrijavanje.
Korak 3 — Odaberite okvir motora i ocjenu snage
Nakon što saznate svoje zahtjeve za okretnim momentom i brzinom, odaberite motor s nazivnim zakretnim momentom i nazivnom brzinom koji udobno pokriva vaše potrebe uz određenu marginu (obično 20–30%). Također potvrdite da fizička veličina okvira odgovara vašem prostoru za ugradnju — servo motori su obično dostupni u veličinama prirubnica od 40 mm do 200 mm ili većim.
Korak 4 — Uskladite servo pogon
Servo pogon mora biti usklađen s naponom, strujom i vrstom enkodera motora. Većina proizvođača prodaje odgovarajuće setove motornih pogona (npr. serija Yaskawa Sigma, serija Mitsubishi MR-J, serija Siemens S-1FK) što pojednostavljuje postavljanje. Ako miješate robne marke, pažljivo provjerite kompatibilnost između nazivnog napona, protokola kodera (inkrementalni, apsolutni, EnDat, BiSS-C itd.) i kontrolnog sučelja (impuls/smjer, analogni ±10 V, EtherCAT, PROFINET itd.).
Korak 5 — Razmotrite uvjete okoline
Provjerite radno okruženje. Ako će motor biti izložen rashladnoj tekućini, prašini ili ispiranju, potreban vam je motor s oznakom IP65 ili IP67. Ako će raditi na ekstremnim temperaturama, provjerite raspon temperature okoline motora. Za hranu i piće ili farmaceutsku primjenu mogu biti potrebne brtve vratila od nehrđajućeg čelika i posebni premazi.
Osnove ožičenja i instalacije
Ispravna instalacija AC servo motora jednako je važna kao i odabir pravog. Imajte na umu nekoliko ključnih točaka:
- Odvojeni strujni i signalni kabeli: Uvijek vodite kabel napajanja motora (U, V, W faze) odvojeno od kabela povratne veze kodera. Njihovo pokretanje u istom vodu može uzrokovati smetnje koje destabiliziraju regulacijski krug.
- Koristite oklopljene kabele: I kabel za napajanje i kabel kodera trebaju biti oklopljeni, s oklopom uzemljenim na jednom kraju (obično na strani pogona) kako bi se spriječilo pojavljivanje šuma.
- Uzemljite tijelo motora: Kućište motora mora biti spojeno na uzemljenje okvira stroja kako bi se spriječio strujni udar i smanjile EMI emisije.
- Provjerite slijed faza: Priključci U, V, W moraju odgovarati između motora i pogona. Ako motor radi u pogrešnom smjeru, zamijenite bilo koje dvije fazne žice — nikada ne mijenjajte žice enkodera da biste odredili smjer.
- Koristite dinamički kočioni otpornik: Za motore koji pokreću vertikalna opterećenja ili zahtijevaju brzo zaustavljanje, vanjski kočni otpornik spojen na pogon apsorbira regenerativnu energiju tijekom usporavanja i sprječava prenaponske kvarove.
Podešavanje servo pogona: postizanje najbolje izvedbe
Nakon ožičenja, servo pogon treba podesiti tako da upravljačka petlja ispravno reagira za vašu specifičnu kombinaciju opterećenja motora. Većina modernih servo pogona uključuje funkciju automatskog podešavanja koja vrti motor kroz ispitnu rutinu i automatski izračunava optimalne postavke pojačanja. Ovo je obično dovoljno dobro za standardne aplikacije.
Za zahtjevne primjene — kao što su brzi pick-and-place ili precizno brušenje — može biti potrebno ručno podešavanje triju glavnih PID pojačanja (pojačanje položaja, pojačanje brzine i integralno pojačanje). Povećanje pojačanja čini sustav bržim i tvrđim, ali previsokim i sustav postaje nestabilan i oscilira. Cilj je postići brz odgovor bez prekoračenja ili lovljenja.
Većina pogona također vam omogućuje postavljanje filtara s urezima za suzbijanje frekvencija mehaničke rezonancije, pojačanja unaprijed za poboljšanje točnosti praćenja tijekom ubrzanja i kompenzaciju trenja za smanjenje pogreške položaja pri malim brzinama. Odvajanje vremena za pravilno podešavanje ovih postavki može značajno utjecati na konačnu točnost pozicioniranja i propusnost stroja.
Savjeti za održavanje i rješavanje problema
AC servo motori općenito su vrlo pouzdani jer nemaju četkice ili komutator koji bi se istrošio. Međutim, s vremenom je ipak potrebno određeno održavanje:
- Zamjena ležaja: Ležajevi motora najčešći su habajući predmet. Većina proizvođača određuje intervale zamjene ležajeva na temelju radnih sati — obično svakih 20.000 do 30.000 sati. Prekomjerne vibracije ili buka rani su znak istrošenosti ležaja.
- Pregled kabela kodera: Kabeli kodera često se opetovano savijaju (posebno na robotskim rukama ili portalnim sustavima) i mogu s vremenom razviti unutarnje prekide. Ako servo počne pokazivati pogreške ili greške nepravilnog položaja, prvo posumnjajte na kabel kodera.
- Provjere pregrijavanja: Ako je motor vruć, provjerite je li radni ciklus unutar specifikacije, je li temperatura okoline prihvatljiva i je li površina motora čista i bez zapreka. Dugotrajno pregrijavanje degradira izolaciju namota i skraćuje vijek trajanja motora.
- Kodovi alarma pogona: Kada se pojavi greška, uvijek pročitajte kod alarma sa zaslona ili softvera servo pogona. Uobičajeni kodovi uključuju prenapon, prekostruju, pogrešku enkodera, preopterećenje i prekoračenje odstupanja položaja. Svaki vas upućuje izravno na glavni uzrok.
Vođenje dnevnika održavanja o radnim satima motora, povijesti alarma i svim fizičkim pregledima uvelike doprinosi predviđanju kvarova prije nego što uzrokuju neplanirane zastoje.
Prethodni post
Nema prethodnog članka
Sljedeći post
Objašnjenje pogona srednjeg napona promjenjive frekvencije: kako radi, koju topologiju odabrati i što navesti
Autorska prava 2024 Fujian Raynen Technology Co., Ltd. Sva prava pridržana.
Politika privatnosti  Proizvođači upravljanja motorom
Proizvođači upravljanja motorom